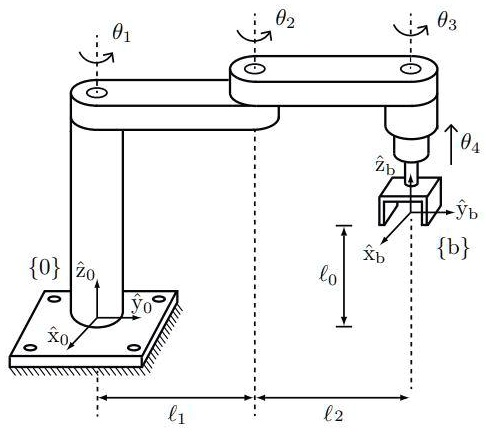
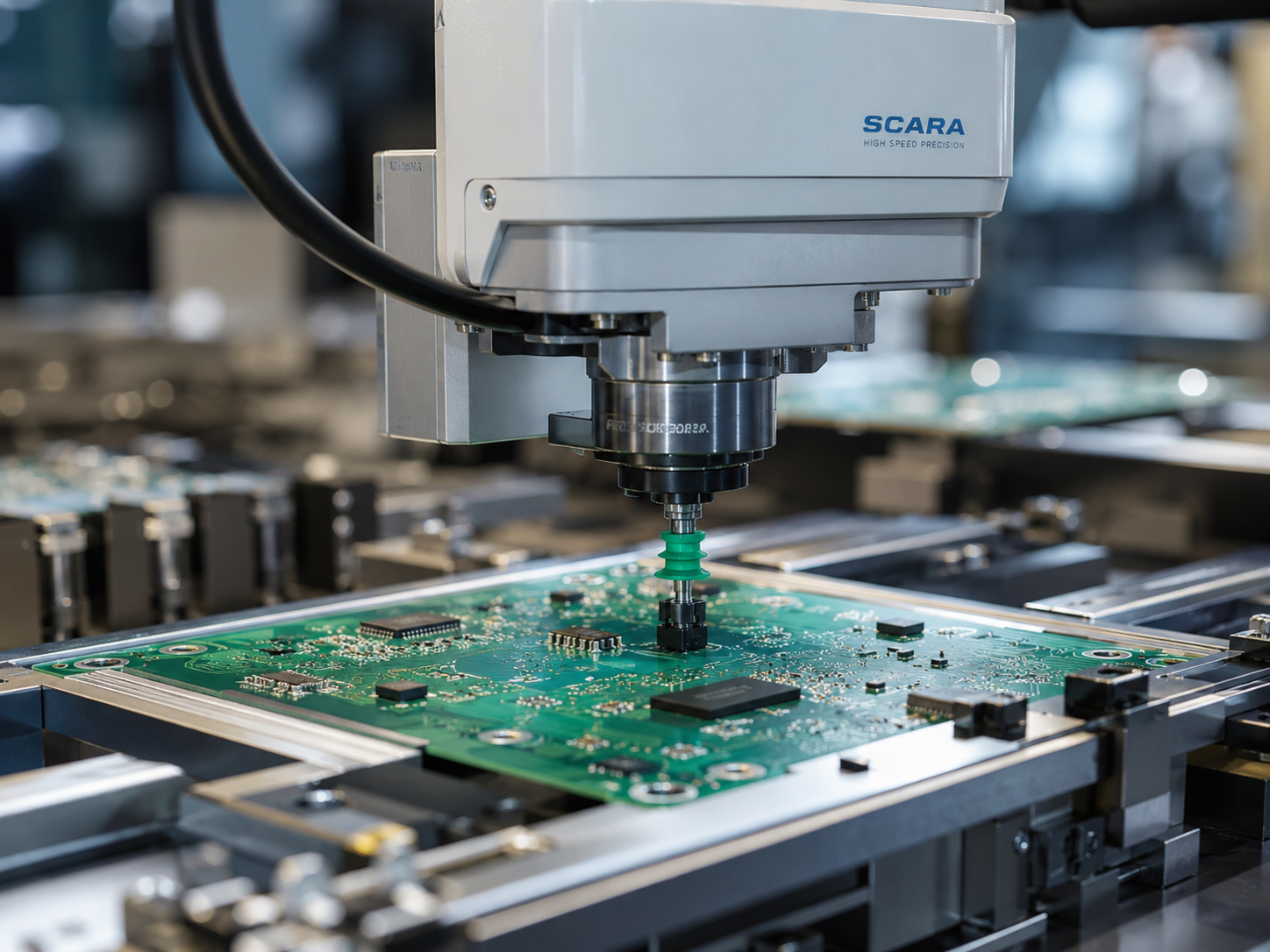
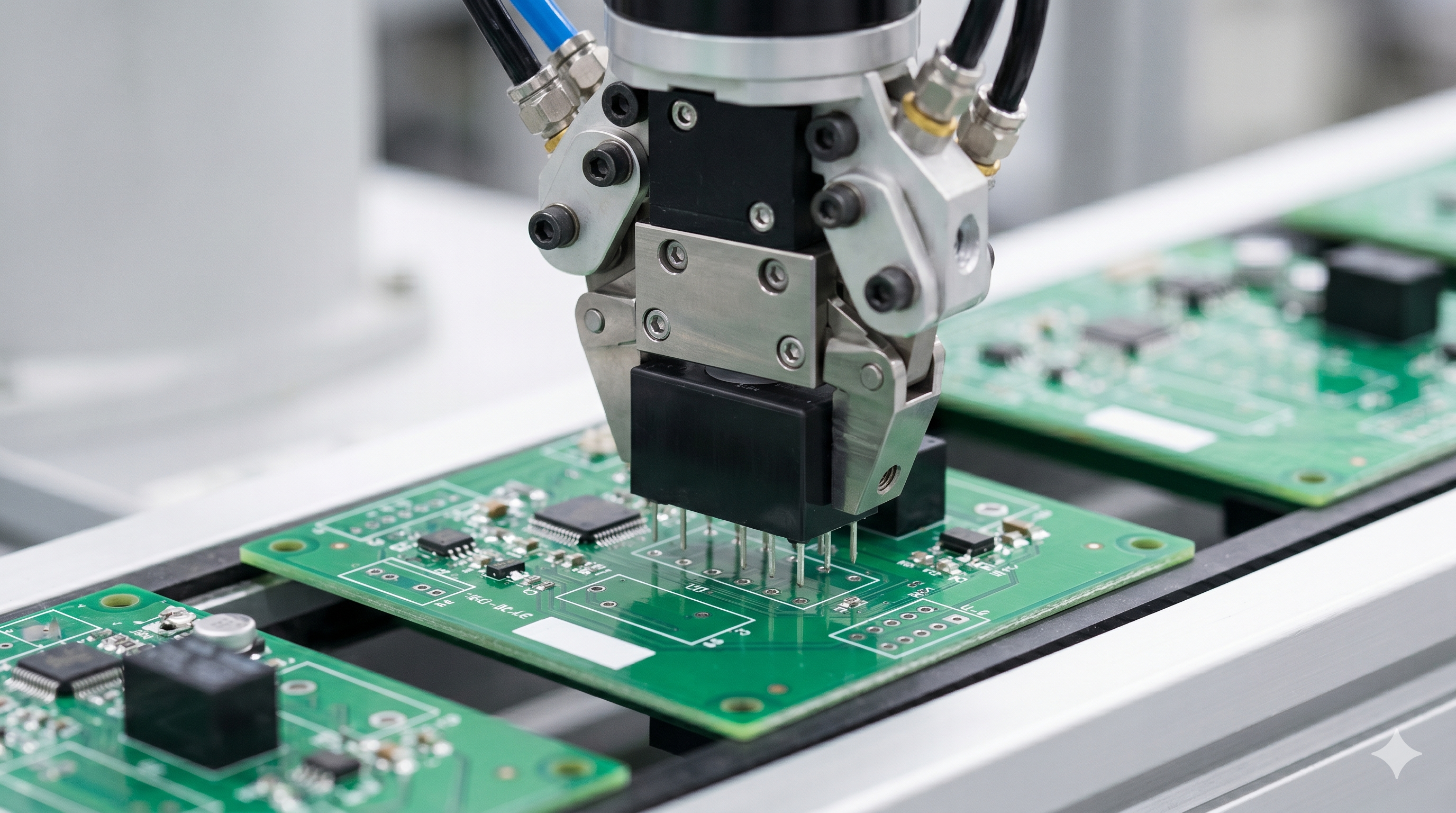
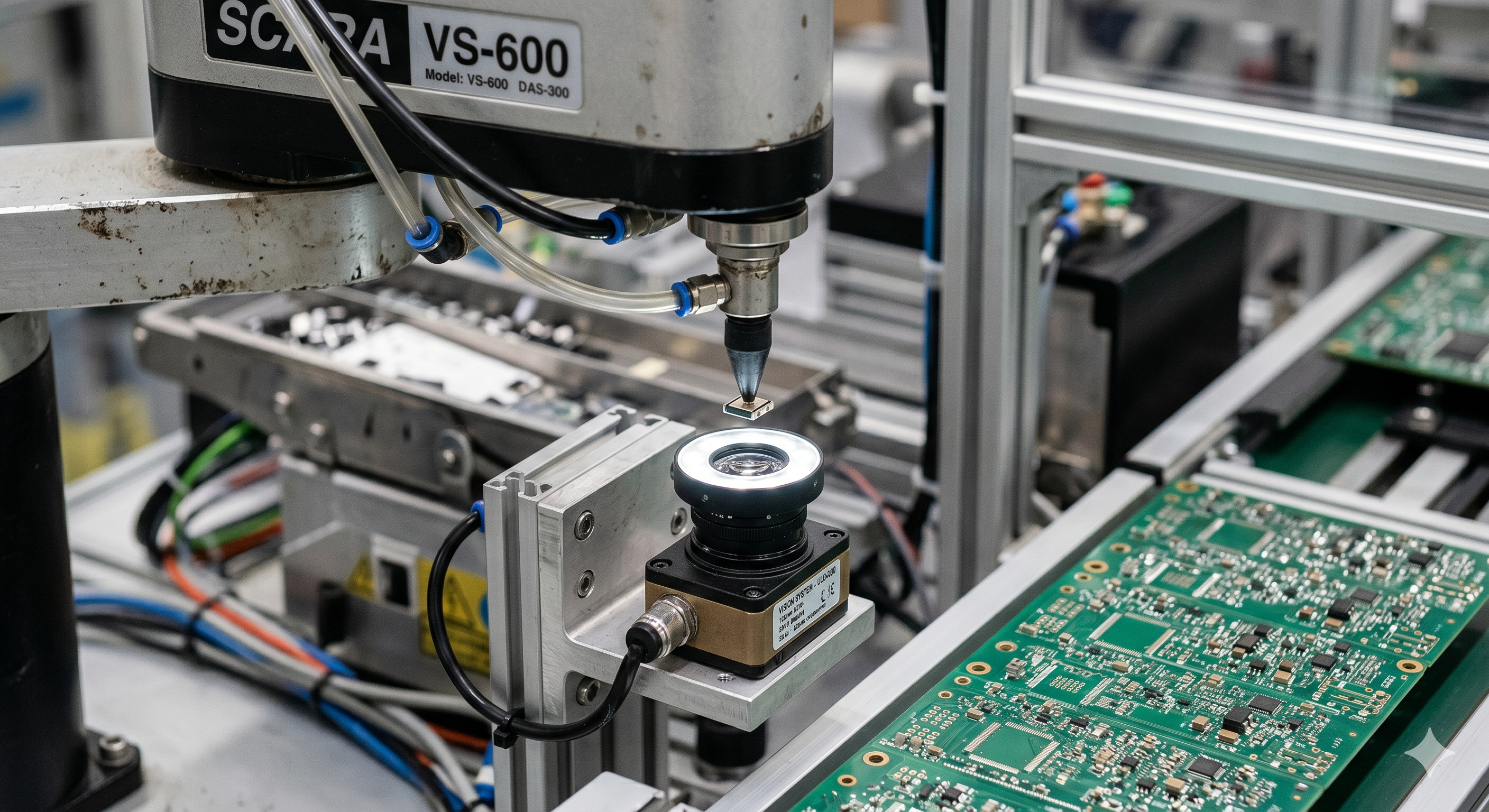
Приложение на
SCARA Роботите
в Pick-and-Place Процесите при Печатни Платки
Анализ на селективно съвместимите роботизирани ръце, тяхната механика и ролята им в автоматизираното сглобяване на електроника.
Към презентацията